伺服系统由控制器、驱动器、直线电机、平衡系统及运动负载、直线导轨单元、以及导轨单元固定支架以及底座组成。操控终端通过数字接口向伺服系统发出动作指令,由可编程控制器接收并识别指令信息,控制驱动器驱动直线电机带动负载完成升降运动,并进行系统保护控制及状态指示功能.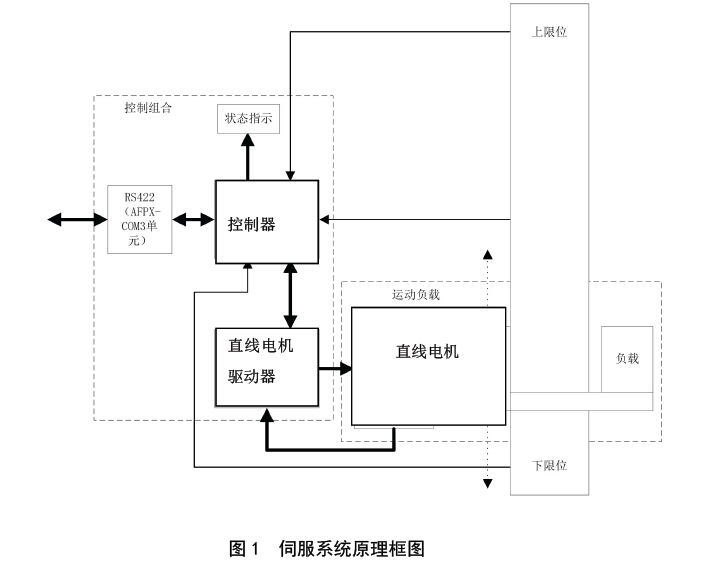
伺服结构设计
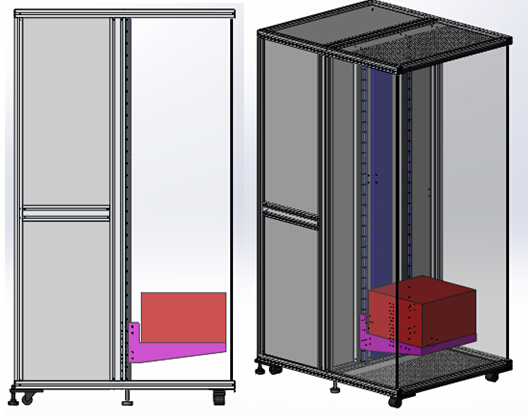
伺服结构如图2所示
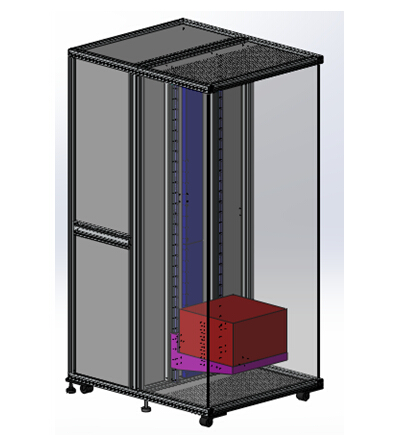
图2 伺服结构图
如上图2所示,负载部分(负载长×宽×高尺寸为422×422×250,按30Kg作最大估计,可能根据实际重量再做调整)和电机部分构成了联合运动体。
1)负载部分安装在底板上,为减小运行时的风阻,底板的外形应该设计为倒梯形。
2)运动联合体按50Kg计算,在设备舱内部,通过一套环形的钢丝机构将运动联合体和一个等重的配重块连接,即运动联合体上下和等重的配重块上下分别由两根共四根环形的钢丝(钢丝绳的寿命≥3年)连接,环形的钢丝在设备舱上下安装的定滑轮分别绕过。
3)为了检测钢丝断裂,钢丝串入检测开关,向伺服系统输出钢丝完好或断裂的信号。
4)等重配重块及其运动轨道固定在图2所示电机对面(即电机的后面)的设备舱面上。
5)电机右侧安装,左侧设备舱空间放置控制器以及驱动器等电器设备